Product Description
60mm DC SERVO MOTOR WITH BRAKE
Specification:
| General Specification | |
| (Item) | (Specification) |
| Winding type | Star |
| Hall effect angle | 120 120 degree electrical angle |
| Shaft run out | 0.571mm |
| Radial play | 0.02mm@450g |
| End play | 0.08mm@450g |
| Max.radial force | 115N @20mm form the flange |
| Max.axial force | 45N |
| Insulation class | Class B |
| Dielectric strength | 500VDC for 1 minute |
| Insulation resistance | 100MΩ Min.,500VDC |
| Electrical Specification | |||||
| Specification | Unit | JK60BLS01 | JK60BLS02 | JK60BLS03 | JK60BLS04 |
| Number Of Phase | Phase | 3 | |||
| Number Of Poles | Poles | 8 | |||
| Rated Voltage | VDC | 48 | |||
| Rated Speed | Rpm | 3000 | |||
| Rated Torque | N.m | 0.3 | 0.6 | 0.9 | 1.2 |
| Rated Current | Amps | 2.8 | 5.2 | 7.5 | 9.5 |
| Rated Power | W | 94 | 188 | 283 | 377 |
| Peak Torque | N.m | 0.9 | 1.8 | 2.7 | 3.6 |
| Peak Current | Amps | 8.4 | 15.6 | 22.5 | 28.5 |
| Back E.M.F | V/Krpm | 12.1 | 12.6 | 12.4 | 13.3 |
| Torque Constant | N.m/A | 0.116 | 0.12 | 0.118 | 0.127 |
| Rotor Inertia | Kg.c | 0.24 | 0.48 | 0.72 | 0.96 |
| Body Length | mm | 78 | 99 | 120 | 141 |
| Weight | Kg | 0.85 | 1.25 | 1.65 | 2.05 |
| Sensor | /Honeywell | ||||
| Insulation Class | B | ||||
| Degree of Protection | IP30 | ||||
| Storage Temperature | -25~+70ºC | ||||
| Operating Temperature | -15~+50ºC | ||||
| Working Humidity | 85% RH | ||||
Drawing:
Company Profile:
HangZhou CHINAMFG CO.,LTD (HangZhou Jingkong Motor&Electric Appliance Co.,Ltd)is an ISO9001 Professional
manufacturer. Was established in 2011 year. We are a professional manufacturer in HangZhou city, China. Production Capacity
exceeds more than 1million motors per year.
Our Company offers 3 major series of products: Hybrid Stepper motors, Brushless Dc motor and Dc Brush motor.
We are always continues develop new type models.We are also have several joint venture companies who specialized in the
production of AC servo motor, PM stepper motors, Spindlemotor and Motor drivers. We export our motors to more than 30
countries Such as United States, Germany, Russia, Turkey, Brazil and so on.
Jkongmotor sold to major manufacturing Companies for Industry of automation, medical and health care equipment,
3d printermachines, packing devices, Information Technology, household appliance products. We have an Engineering team
with many years of experience in application Engineering, design Engineering with the latest advances equipment. Our
Engineering Staff provides the finest quality product with service after the product is delivered to our Customers.
| Application: | Universal, Industrial, Household Appliances, Car, Power Tools |
|---|---|
| Operating Speed: | High Speed |
| Function: | Control |
| Casing Protection: | Closed Type |
| Number of Poles: | 8 |
| Structure and Working Principle: | Brushless |
| Samples: |
US$ 28.5/Piece
1 Piece(Min.Order) | |
|---|
| Customization: |
Available
| Customized Request |
|---|

How do you calculate the gear ratio involving sun, planet, and ring gears?
The gear ratio in a planetary gear system can be calculated by considering the number of teeth on the sun gear, planet gears, and ring gear. The gear ratio determines the relationship between the input speed and the output speed of the system. Here’s how you can calculate the gear ratio:
- Step 1: Count the Teeth:
Count the number of teeth on the sun gear (S), the planet gears (P), and the ring gear (R). These numbers represent the respective gear’s tooth count.
- Step 2: Determine the Gear Arrangement:
Identify the gear arrangement. In a simple planetary gear system, the sun gear is at the center, surrounded by planet gears, and enclosed by the ring gear.
- Step 3: Calculate the Gear Ratio:
The gear ratio (GR) can be determined using the formula:
GR = (R + P) / S
Where:
- R represents the number of teeth on the ring gear
- P represents the number of teeth on the planet gears (assuming they have the same number of teeth)
- S represents the number of teeth on the sun gear
The resulting gear ratio represents the speed relationship between the input and output of the planetary gear system. A gear ratio greater than 1 indicates a speed reduction, while a gear ratio less than 1 indicates a speed increase.
It’s important to note that in more complex planetary gear systems, where there are multiple sets of planet gears or additional gears, the calculation of the gear ratio may involve considering multiple gear stages and their respective tooth counts.
In summary, to calculate the gear ratio involving sun, planet, and ring gears, you need to count the teeth on each gear and use the formula (R + P) / S, where R is the number of teeth on the ring gear, P is the number of teeth on the planet gears, and S is the number of teeth on the sun gear. This calculation provides the gear ratio that defines the speed relationship between the input and output of the planetary gear system.
How do planetary gears handle variations in tooth engagement during operation?
Planetary gears are designed to handle variations in tooth engagement during operation, ensuring smooth and reliable performance. Let’s explore how planetary gears address these variations:
- Tolerance for Misalignment:
Planetary gears are designed with a certain degree of tolerance for misalignment. This means that slight variations in tooth engagement due to manufacturing tolerances, assembly, or operating conditions are accommodated without causing significant impact on the gear system. The gear teeth are carefully designed with appropriate profiles, clearances, and backlash to allow for some degree of misalignment while maintaining proper functioning.
- Load Distribution:
The arrangement of multiple planet gears in a planetary gear system helps distribute the load across multiple gear teeth. Each planet gear shares the load with the adjacent gears, reducing the stress on individual teeth and promoting even tooth engagement. This load distribution capability helps minimize localized wear, noise, and vibration, resulting in smoother and more efficient operation.
- Flexible Mounting and Support:
Planetary gears are often mounted on flexible support structures, such as bearings or flexible couplings. These components help absorb and compensate for small variations in tooth engagement during operation. The flexible mounting and support systems provide some degree of flexibility and compliance, allowing the gears to self-adjust and maintain proper tooth contact under varying operating conditions.
- Lubrication and Cooling:
Proper lubrication and cooling play a crucial role in handling variations in tooth engagement. Lubricants reduce friction and wear between gear teeth, ensuring smooth operation and minimizing the impact of tooth engagement variations. Additionally, effective cooling mechanisms help dissipate heat generated during operation, preventing excessive temperature rise that could affect the gear meshing performance.
- Robust Construction:
Planetary gears are typically constructed using high-strength materials and precise manufacturing techniques. This robust construction enhances the gear system’s ability to withstand variations in tooth engagement. By ensuring high-quality gear components, proper heat treatment, and stringent quality control, planetary gears are built to handle the dynamic loads and variations encountered during operation.
In summary, planetary gears handle variations in tooth engagement through their tolerance for misalignment, load distribution among multiple planet gears, flexible mounting and support, effective lubrication and cooling, and robust construction. These design considerations and features enable planetary gears to maintain proper tooth contact, minimize wear and noise, and ensure reliable performance in various applications, including automotive transmissions, industrial machinery, and power transmission systems.

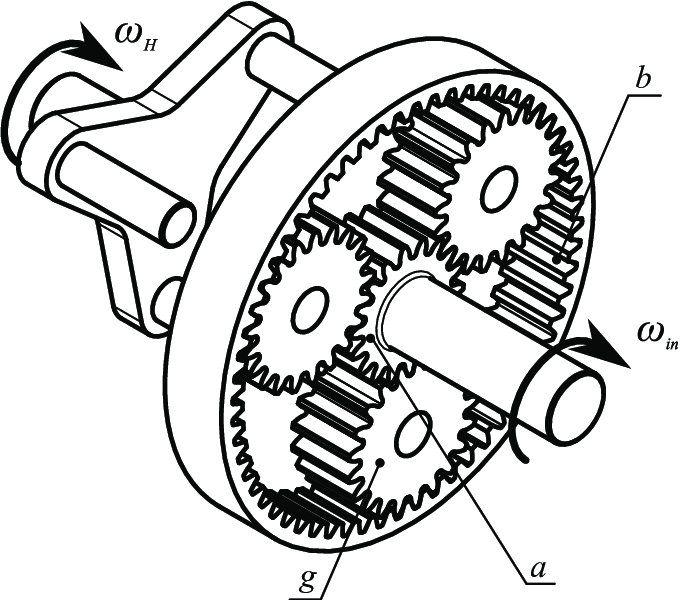
Can you describe the role of sun gears, planet gears, and ring gears in planetary systems?
In a planetary gear system, each component—the sun gear, planet gears, and ring gear—plays a crucial role in the overall operation and functionality. Let’s explore the roles of these gears:
- Sun Gear:
The sun gear is a central component in a planetary gear system. It is typically located at the center and is driven by an input source such as a motor or engine. The sun gear receives the input power and transmits it to the other gears in the system. As the sun gear rotates, it drives the rotation of the planet gears, which, in turn, contribute to the overall gear operation. The size and number of teeth on the sun gear determine the gear ratio and torque characteristics of the system.
- Planet Gears:
The planet gears are gears that surround the sun gear in a planetary gear system. They are typically smaller in size compared to the sun gear and are connected to a carrier or arm. The planet gears mesh with both the sun gear and the ring gear. As the sun gear rotates, it drives the rotation of the planet gears. The planet gears exhibit both rotational and orbital motion. While they rotate on their own axes, they also orbit around the sun gear. This combination of rotational and orbital movement allows the planet gears to transmit torque and contribute to the overall gear reduction or amplification. The arrangement and number of planet gears can vary depending on the specific design and requirements of the system.
- Ring Gear:
The ring gear is the outermost gear in a planetary gear system. It has internal teeth that mesh with the planet gears. The ring gear remains fixed or stationary while the sun gear and planet gears rotate. The interaction between the planet gears and the ring gear enables the gear system to achieve gear reduction or amplification. The size and number of teeth on the ring gear also influence the gear ratio and torque characteristics of the system.
In summary, the sun gear serves as the primary driver, receiving the input power and transmitting it to the other gears. The planet gears rotate and orbit around the sun gear, contributing to torque transmission and gear functionality. The ring gear remains fixed and meshes with the planet gears, allowing for gear reduction or amplification. Together, these gears work in harmony to achieve the desired gear ratios, torque transmission, and overall operation of planetary gear systems.


editor by CX 2023-11-02